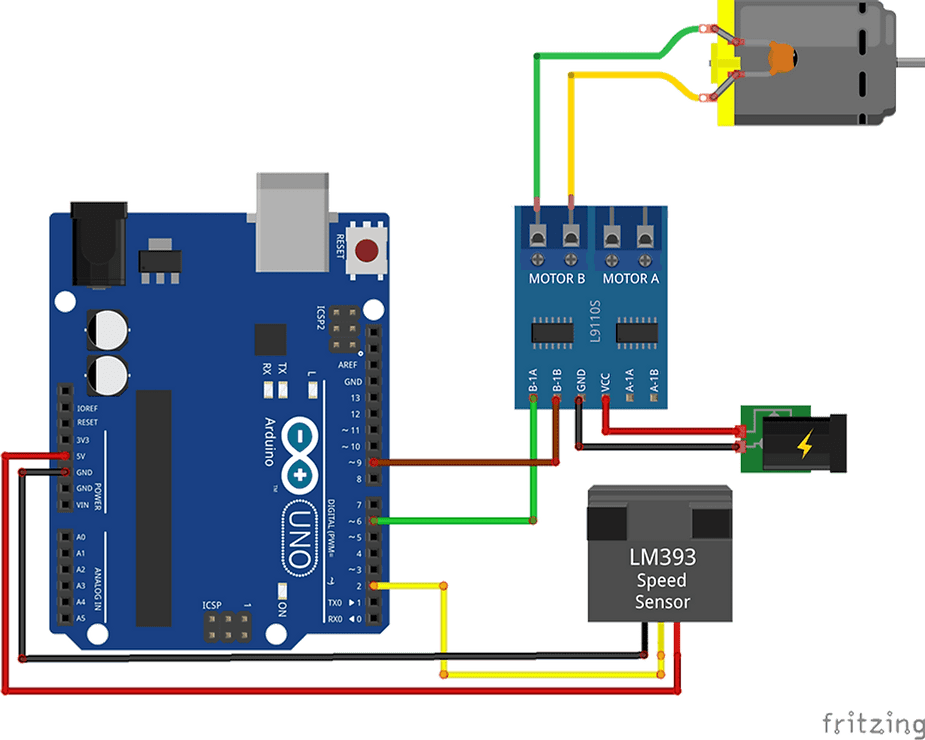








This speed measuring sensor is a wide voltage, high resolution, short response time, and the switch output speed measurement module. It can test the motor’s rotational speed with a black encoder (measured spec. is related to the encoder, the inner diameter of D type encoder that provided is 4mm, can be used for motor output shaft w/ 4mm diameter, which is TT motor we matched, yellow shell and white axis)
Features :
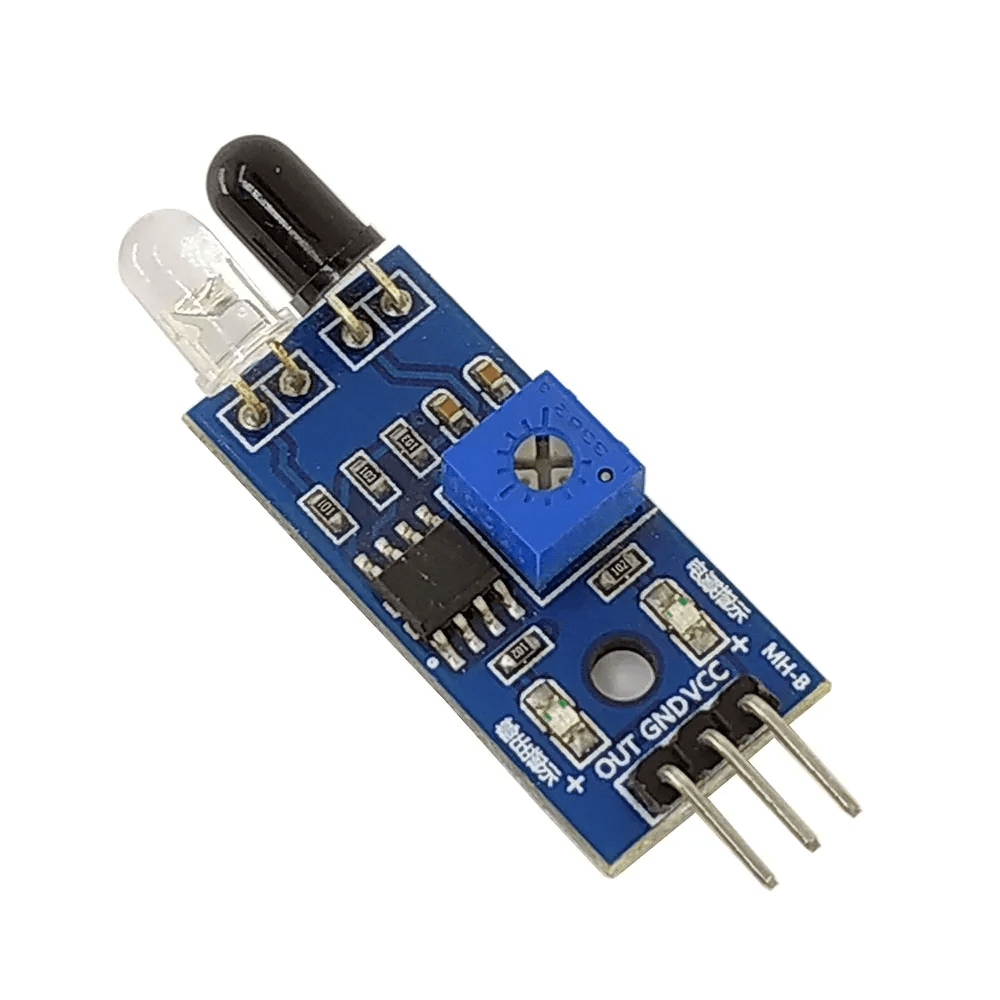
- Signal output: A, B two way; The TTL level
- Disc diameter: 24mm
- Inner Disc Diameter: 4 mm
- The encoder resolution is about 20 line
- Speed measuring sensor configuration: The configuration can measure 1 road motor speed
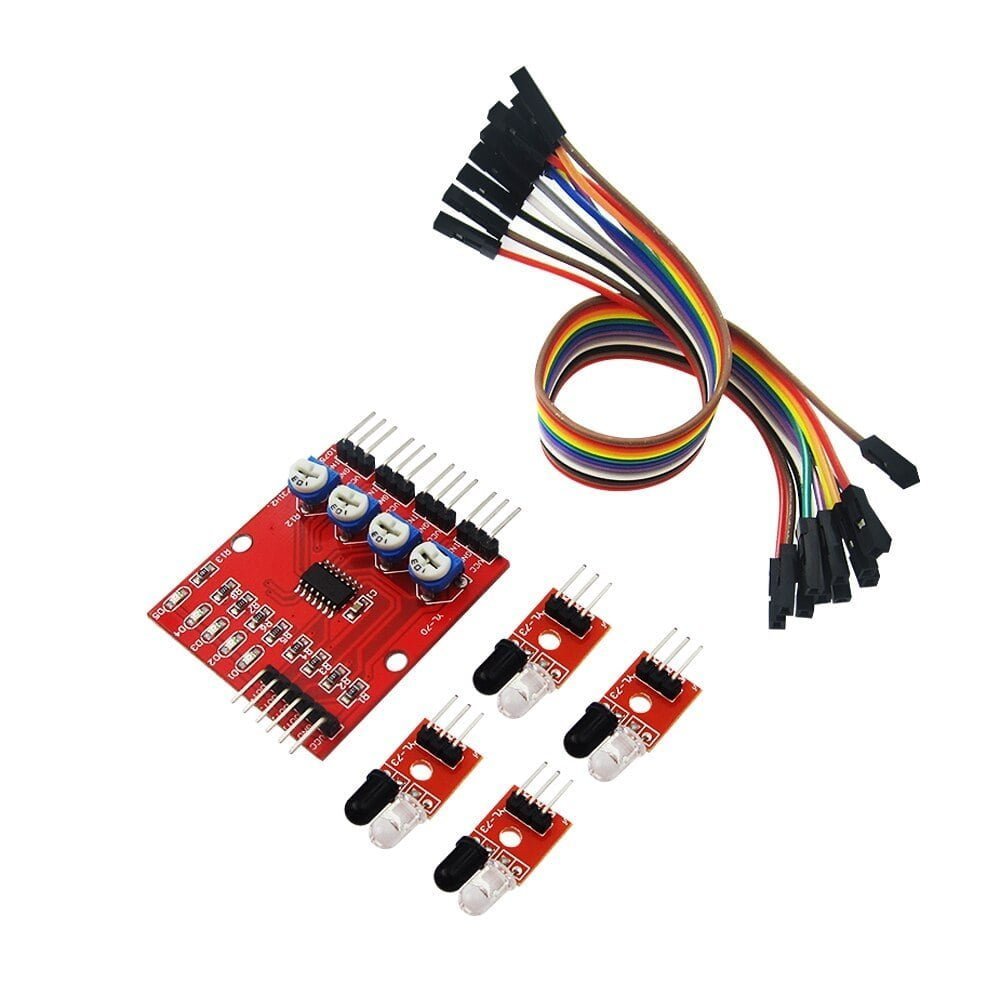
Package Includes :
1 x Double Speed Measuring Module kit
1 x Screw set