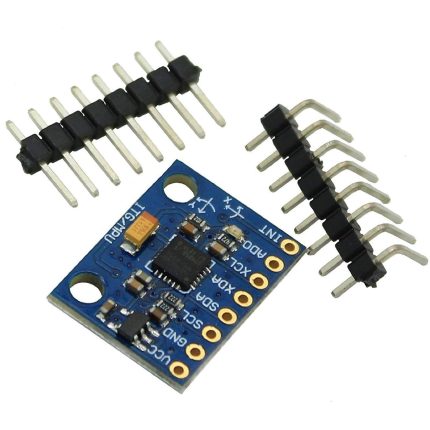
GY-521 MPU-6050 I2C Module 3-Axis Gyro & Accelerometer for Arduino
- 3-axis Gyro+Acceleration+Magnetic Fiel
- Air Pressure Module
- Power supply: 3-5V
- Build in ultra low noise linear LDO voltage regulator
- Built-in onboard filters, which reduce noise from motor and other high current electronics
- You can easily select two I2C address for MPU6050 by soldered jumper
145,00 EGP
In stock
In stock
16
People watching this product now!
Payment Methods:
Description
MPU6050 is a frequently preferred sensor in aircraft, balance robots and many other areas.
It is a 6-axis IMU board with a 3-axis Gyro and a 3-axis angular accelerometer.
Features:
- Operating Voltage: 3.0 V – 5.0 V
- Gyro Measurement Range: ±250, ±500, ±1000, ±2000 ⁰/s
- Angular Accelerometer Measurement Range: ±2, ±4, ±8, ±16 g
- Communication Interface : I2C
- Dimensions: 20.3mm X 15.6mm
Documents:
- Sample Arduino Application
- Arduino Playground
- Example Raspberry Pi Application
Package Included:
- 1 x MPU6050 Acceleration and Gyro Sensor Board
- 1 x 1×8 Header(Male)
- 1 x 1×8 Header(Male-90⁰)
Specification
General
| WeightWeight | 5,0000 g |
|---|---|
 Dimensions Dimensions | 22 × 17 × 5 cm |
| type | GY-87 |
| driver-ic | MPU6050 |
| operating-voltage-vdc | 3 ~ 5 |
| gyro-range-s | ± 250, 500, 1000, 2000 |
| acceleration-rangeg | ± 2 ± 4 ± 8 ± 16 |
| communication | I2C Protocol |
Customer Reviews
Related Products



-11%
Original price was: 450,00 EGP.400,00 EGPCurrent price is: 400,00 EGP.