

DIY Self Balancing Robot – Bundle Package
Product Highlights
- Real-Time Balancing: Advanced two-wheeled stability using PID control algorithms.
- 6-Axis Motion Tracking: Integrated MPU6050 (Gyro + Accelerometer) for high-precision tilt sensing.
- High-Torque Drive System: Geared DC motors provide the rapid response needed for upright balance.
- Ultimate Learning Tool: Master PID tuning, Kalman filtering, and robotics engineering in one project.
- Arduino Compatible: Open-source platform allows for easy programming and infinite custom features.
- Robust & Expandable: Durable chassis with mounting points for ultrasonic sensors and Bluetooth modules.
0,00 EGP
18
People watching this product now!
Description
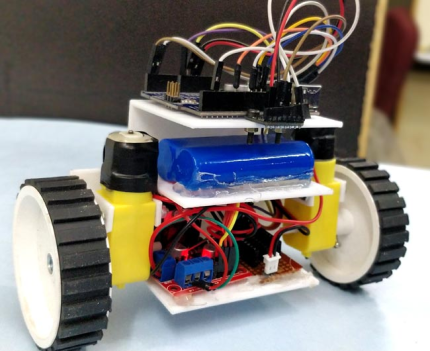
Self-Balancing Robot Learning Kit for Arduino
Master the physics of inverted pendulums with the Self-Balancing Robot Kit.
This comprehensive package includes all the essential hardware to build a high-performance
two-wheeled robot that maintains its balance using real-time sensor feedback and PID control
algorithms. It is the ultimate hands-on project for learning Robotics, Control Systems,
and Inertial Measurement Units (IMU).
Key Features
- Precision Balancing: High-speed processing allows the robot to react instantly to tilt angles.
- Advanced IMU Integration: Uses the MPU6050 (Gyroscope + Accelerometer) for 6-axis motion tracking.
- High-Torque Drive: Equipped with geared DC motors for the necessary “kick” to maintain upright stability.
- Expandable Design: The provided chassis has extra mounting holes for ultrasonic sensors, Bluetooth modules, or displays.
- Educational Value: Perfect for practicing PID (Proportional-Integral-Derivative) tuning and Kalman filtering.
What’s Inside the Package?
| Component | Quantity / Model |
|---|---|
| Main Controller | Arduino Compatible Board (Nano/Uno/Mega) |
| Motion Sensor | MPU6050 6-Axis Gyro & Accelerometer |
| Motor Driver | L298N or TB6612FNG Dual H-Bridge |
| Motors | 2x DC Geared Motors (High Torque) |
| Wheels | 2x High-Grip Rubber Robot Wheels |
| Chassis | Multi-Layer Acrylic or Aluminum Frame Kit |
| Accessories | Jumper Wires, Spacers, Screws, and Battery Holder |
Technical Specifications
- Operating Voltage: 7.4V to 12V DC (Powered by 2S or 3S Li-Po/Li-Ion).
- Communication: I2C (for MPU6050) and PWM (for Motor Control).
- Maximum Incline: Up to 15-20 degrees (Depending on PID tuning).
- Programming Environment: Arduino IDE (C++), Scratch, or MicroPython.
Learning Objectives
- Understand the difference between Accelerometer and Gyroscope data.
- Learn how to implement a PID Controller for real-world stability.
- Master motor speed control using PWM (Pulse Width Modulation).
- Develop wireless remote control features (optional with Bluetooth/WiFi modules).
Expert Tip: Balancing depends 70% on software tuning and 30% on weight distribution. Keep your heavy components (like the battery) as low as possible for a more stable center of gravity!
هذا الوصف والمواصفات تمت كتابته بمساعدة الذكاء الاصطناعي، يُرجى مراجعته قبل الشراء.
برجاء تأكيد الطلب على
الواتساب
للتأكد من توفر المخزون قبل الدفع
Specification
General
| WeightWeight | 0,0000 g |
|---|---|
| Dimensions | 20 × 15 × 12 cm |
| Model | SBR-UNO-V1 |
| Body Material | 3D Printed (PLA/ABS) |
| Power Source | 2× 18650 Lithium Batteries |
| Battery Holder | Dual 18650 Battery Holder |
| IMU Sensor | MPU6050 (6-axis Gyroscope + Accelerometer) |
| Motor Driver | L298N Dual H-Bridge Motor Driver |
| Microcontroller | Arduino Uno R3 |
| Switch | ON/OFF Power Switch |
| Motors | 2× DC Gear Motors (12V, 300 RPM) |
| Wheels | 2× Rubber Wheels (65mm Diameter) |
| Compatibility | Compatible with Arduino Uno / Nano / Mega |
| Voltage Regulator | Integrated 5V Regulator |
| Control Interface | USB / Optional Bluetooth (HC-05) |
| Firmware | PID Self-Balancing Arduino Code Included |
| Chassis Mounting | Pre-drilled holes for sensors and modules |
| Operating Voltage | 7.4V–12.6V |
| Run Time | 45–90 Minutes (depending on battery and load) |
| Top Speed | 1.2 (m/s) |
| Operating Temperature | 0–50°C |