5-Channel Flame Sensor Module
Multi-directional Flame Detection for Arduino and Robotics Projects
Introduction
The 5-Channel Flame Sensor Module is an infrared detection system capable of identifying flame sources from multiple directions. With five independent IR receivers arranged in a 180° arc, it provides directional flame detection for fire prevention systems, robotics, and safety applications.
 Key Features
Key Features
Multi-directional
Five independent detection channels covering 180°
Analog Output
Provides intensity readings for precise flame location
Adjustable Sensitivity
Potentiometers for each channel’s detection threshold
Easy Integration
Works with 3.3V or 5V systems including Arduino
Technical Specifications
| Detection Angle | 180° (5× 36° sectors) |
|---|---|
| Detection Range | 0.8m-1.5m (depends on flame size) |
| Output Type | 5× Analog + 1× Digital |
| Operating Voltage | 3.3V – 5V DC |
| Current Consumption | <20mA per channel |
| Response Time | <100ms |
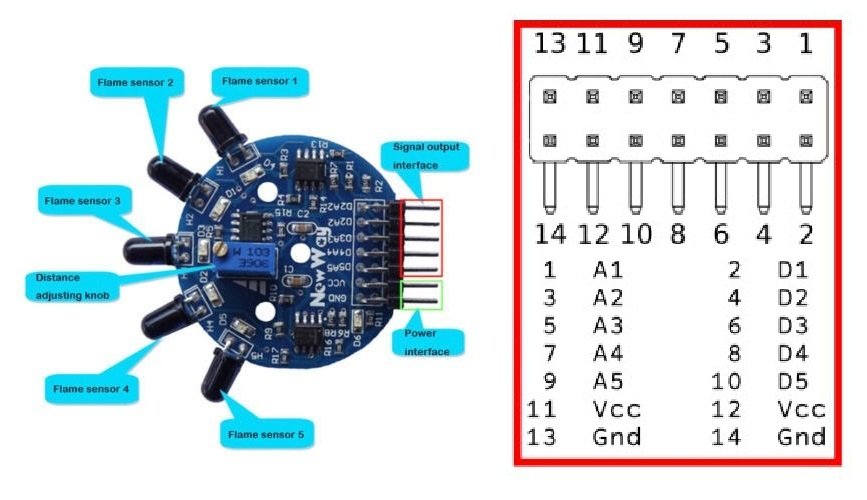
Pin Configuration
| Pin | Label | Description | Arduino Connection |
|---|---|---|---|
| 1 | VCC | Power (3.3V-5V) | 5V |
| 2 | GND | Ground | GND |
| 3 | A1 | Channel 1 Analog | A0 |
| 4 | A2 | Channel 2 Analog | A1 |
| 5 | A3 | Channel 3 Analog | A2 |
| 6 | A4 | Channel 4 Analog | A3 |
| 7 | A5 | Channel 5 Analog | A4 |
| 8 | D0 | Digital Output | D2 |
Note: Each channel has its own sensitivity adjustment potentiometer
Wiring with Arduino
// Basic Connections: // VCC → 5V // GND → GND // A1-A5 → A0-A4 (analog inputs) // D0 → D2 (digital input - optional) // For best results, place sensor 30-50cm above surface
Important: Avoid direct sunlight as it may cause false positives
Basic Detection Example
// 5-Channel Flame Sensor Basic Example
const int channels = 5;
const int pins[channels] = {A0, A1, A2, A3, A4};
void setup() {
Serial.begin(9600);
for(int i=0; i<channels; i++) {
pinMode(pins[i], INPUT);
}
}
void loop() {
for(int i=0; i<channels; i++) {
int value = analogRead(pins[i]);
Serial.print("Channel ");
Serial.print(i+1);
Serial.print(": ");
Serial.print(value);
Serial.print("\t");
}
Serial.println();
delay(200);
}
Directional Flame Detection
// Determine flame direction from 5 sensors
int getFlameDirection() {
int values[5];
int maxVal = 0;
int direction = 0; // 0 = no flame
// Read all channels
for(int i=0; i<5; i++) { values[i] = analogRead(A0 + i); if(values[i] > maxVal && values[i] > 500) { // 500 = threshold
maxVal = values[i];
direction = i + 1; // Channels 1-5
}
}
return direction;
}
void loop() {
int flameDir = getFlameDirection();
if(flameDir > 0) {
Serial.print("Flame detected from direction: ");
Serial.println(flameDir);
}
delay(100);
}
Advanced Features
Threshold Calibration
// Auto-calibration for changing light conditions
int baselines[5];
void calibrateSensors() {
for(int i=0; i<5; i++) {
baselines[i] = analogRead(A0 + i);
// Add 10% safety margin
baselines[i] += baselines[i] * 0.1;
}
}Flame Intensity
// Calculate relative flame intensity
float getFlameIntensity() {
int total = 0;
for(int i=0; i<5; i++) {
total += analogRead(A0 + i);
}
return total / 5.0; // Average intensity
}Digital Output
// Using the digital output pin
void setup() {
pinMode(2, INPUT); // D0 connected to D2
}
void loop() {
if(digitalRead(2) {
Serial.println("Flame detected!");
}
}Robotic Response
// Simple robot fire-fighting logic
void respondToFlame(int direction) {
switch(direction) {
case 1: turnLeft(45); break;
case 2: turnLeft(15); break;
case 3: moveForward(); break;
case 4: turnRight(15); break;
case 5: turnRight(45); break;
}
activateWaterPump();
}Troubleshooting
No Detection
- Adjust sensitivity potentiometers clockwise
- Check IR sensor alignment (should face outward)
- Verify flame is within 0.8-1.5m range
False Positives
- Reduce sensitivity (turn potentiometers CCW)
- Shield sensors from ambient IR sources
- Implement software debouncing in your code
Inconsistent Readings
- Ensure stable power supply (3.3V-5V)
- Check for loose wiring connections
- Recalibrate sensor baselines periodically
Related Posts
MG90S Mini Digital 180° Servo
MG90S Mini Digital 180° Servo
Metal Gear, 2.2kg·cm Torque for RC and Robotics
Introduction
...
XKC-Y25-V Non-Contact Water Liquid Level Sensor
XKC-Y25-V Non-Contact Water Liquid Level Sensor
Capacitive Detection Without Physical Contact
...
Waterproof Ultrasonic Obstacle Sensor, Sensor with Separate Probe
+
Waterproof Ultrasonic Obstacle Sensor
Distance Measurement with Separate Waterproof Probe
...
Water Level Depth Detection Sensor
Water Level Depth Detection Sensor
Liquid Measurement for Arduino and IoT Projects
Introduct...
VL53L0X Purple Laser Distance Sensor Module
VL53L0X Laser Distance Sensor Module
High-Speed, High-Precision Time-of-Flight Distance Measurement
...
TCS34725 RGB Color Sensor Module
TCS34725 RGB Color Sensor Module
High-Accuracy Digital Color Detection with IR Filter
Introd...
TCS3200 Color Sensor Module
TCS3200 Color Sensor Module
Precise RGB Color Detection for Arduino and Embedded Projects
In...
PN532 NFC RFID Read/Write Module V3 Kit
PN532 NFC RFID Read/Write Module V3 Kit
Advanced Near Field Communication for Arduino and Embedded Systems
...
HC-SR501 PIR Motion Sensor Module
HC-SR501 PIR Motion Sensor Module
Passive Infrared Detection for Security and Automation Projects
Flex Sensor 5.6 cm (Detect Bending Motion)
Flex Sensor 5.6cm
Bend Detection Sensor for Arduino and Wearable Electronics Projects
...

ACS712 Current Sensor Module
ACS712 5A Current Sensor Module
Hall-Effect Based AC/DC Current Measurement for Arduino Projects

AS608 Optical Fingerprint Sensor Module
AS608 Optical Fingerprint Sensor Module
High-Precision Biometric Recognition for Arduino and Microcontroller P...

Recent Comments